PromptPay






คือการต่อ ตัวต้านทานที่ขา input ของไมโครคอนโทลเลอร์ เหตุผลที่ต้องต่อคือ ถ้าเราต่อสวิตส์หรือ เซนเซอร์ต่างๆ เข้ากับไมโครคอนโทรเลอร์ตรงๆ อย่างเดียว อาจจะทำให้เกิดสัญญาณรบกวนได้ในกรณีที่ input ถูกลอยขาไว้ ไม่ได้จ่าย logic high หรือ low เช่น การต่อสวิตส์ ถ้าเรากดสวิตส์ จะทำให้มี logic high จ่ายให้กับ input ของไมโครคอนโทลเลอร์ แต่ถ้าเราปล่อยสวิตส์ ทำให้ ขา input ถูกลอยไว้ ไม่ได้ต่อลงกราวหรือ logic low ดังนั้นจึงต้องต่อ Pull up, Pull down เพื่อให้แน่ใจว่าเป็น logic high หรือ low เสมอ ถึงแม้ว่าจะไม่มี input ป้อนเข้ามา
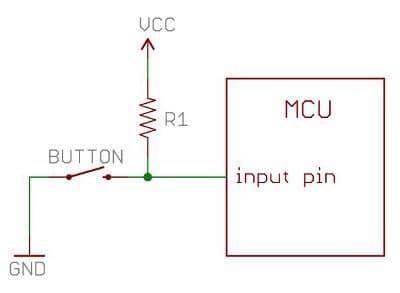
Pull up คือ การต่อตัวต้านทานจาก vcc เข้ากับ input ของ ไมโครคอนโทลเลอร์ ดังรูป
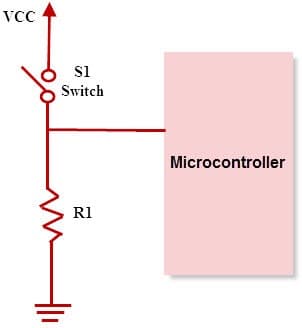
Pull down คือการต่อ ตัวต้านทาน จาก input ของไมโครคอนโทลเลอร์ เข้ากับ กราว ดังรูป
สวัสดีครับ ในบทความนี้ก็เป็น EP.8 แล้วนะครับ โดยเนื้อหาจะเป็นเรื่องเกี่ยวกับ Channel Select Multiple Communication Operationsสําหรับท่านใดที่ยังไม่ได้อ่าน EP.7 ท่านสามารถกลับไปอ่านก่อนได้นะครับที่นี่ Go EP.7 Go Unit Testingในบทความก่อนหน้านี้เราได้เรียนรู้เรื่องการใช้งาน Go Channel กันไปแล้ว จะเห็นว่าถ้าเราต้องการส่งข้อมูลมากกว่า 1 Channel อาจจะทําเกิด blocking การทำงาน เมื่อ Channel ใด Channel หนึ่งไม่มีการรับส่งข้อมูล หรือไม่สามารถส่งข้อมูลได้อีก สิ่งที่จะมาช่วยให้โปรแกรมของเราทํางานต่อไปได้ก็คือ Select statement เรามาดูวิธีการใช้งานตามหัวข้อด้านล่างเลยครับ
การ remote หรือเข้าไปใช้งานเครื่องที่เป็นระบบปฏิบัติการ ubuntu ส่วนใหญ่จะ remote เข้าไปแบบ SSH หรือ telnet การใช้งานแบบนี้จะค่อนข้างยุ่งยาก จะเป็นไปได้ไหมถ้าเราจะ remote desktop จาก windows--->ubuntu ซึ่ง remote desktop บน windows จะใช้โปรโตคอล RDP หลังจากหาข้อมูลก็ได้พบกับโปรแกรมนี้ xrdp
Auto login on raspberry pi ถ้าเราใช้ debian บน raspberry pi ในโหมด gui ระบบจะ login user: pi ให้เราโดยอัตโนมัติ แต่ถ้าเราต้องการให้ login ด้วย user อื่นๆ ก็สามารถทำได้โดย แก้ไข ไฟล์ "/etc/lightdm/lightdm.conf" ด้วยคำสั่งนี้