PromptPay






คือการต่อ ตัวต้านทานที่ขา input ของไมโครคอนโทลเลอร์ เหตุผลที่ต้องต่อคือ ถ้าเราต่อสวิตส์หรือ เซนเซอร์ต่างๆ เข้ากับไมโครคอนโทรเลอร์ตรงๆ อย่างเดียว อาจจะทำให้เกิดสัญญาณรบกวนได้ในกรณีที่ input ถูกลอยขาไว้ ไม่ได้จ่าย logic high หรือ low เช่น การต่อสวิตส์ ถ้าเรากดสวิตส์ จะทำให้มี logic high จ่ายให้กับ input ของไมโครคอนโทลเลอร์ แต่ถ้าเราปล่อยสวิตส์ ทำให้ ขา input ถูกลอยไว้ ไม่ได้ต่อลงกราวหรือ logic low ดังนั้นจึงต้องต่อ Pull up, Pull down เพื่อให้แน่ใจว่าเป็น logic high หรือ low เสมอ ถึงแม้ว่าจะไม่มี input ป้อนเข้ามา
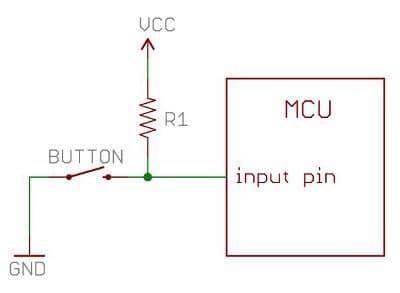
Pull up คือ การต่อตัวต้านทานจาก vcc เข้ากับ input ของ ไมโครคอนโทลเลอร์ ดังรูป
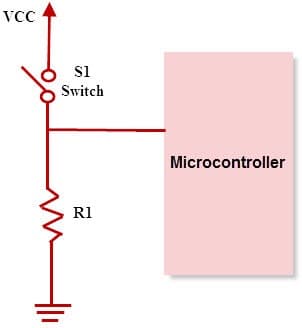
Pull down คือการต่อ ตัวต้านทาน จาก input ของไมโครคอนโทลเลอร์ เข้ากับ กราว ดังรูป
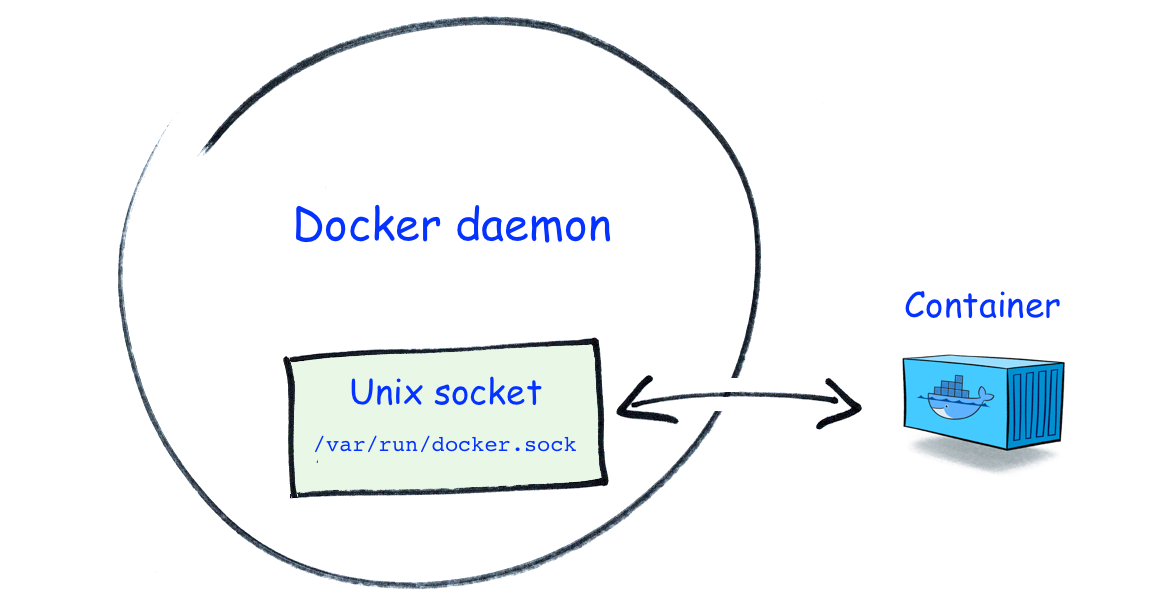
สวัสดีครับ ในบทความนี้จะมีเนื้อหาเกี่ยวกับการใช้งาน และควบคุม Docker daemon จากภายใน Container ครับ หมายความว่าเมื่อเรา Start docker container ขึ้นมาแล้ว ภายใน Container นั้น เราจะสามารถ เข้าถึง และควบคุม Container อื่นๆได้
ในปัจจุบันมี web server อยู่สองเจ้าที่ได้รับความนิยมคือ apache2 และ nginx สองเจ้านี้จะมีขอดีข้อเสียงต่างกัน nginx จะมีข้อดีคือ สามารถรองรับ user concurrent และ request static file ได้ดีกว่า apache2 ส่วน apache2 มีข้อดีคือ PHP ซึ่ง PHP ของ nginx นั้น จะทำงานผ่านโมดูล FastCGI อีกทีหนึ่ง ซึ่งจะได้ Performance ที่ช้ากว่า mod_php ของ apache2 ที่ทำงานแบบ
รางวัลผู้นำโลกด้านทรัพย์สินทางปัญญา พ.ศ.2551ข้อมูลเหรียญกษาปณ์ที่ระลึกเฉลิมพระเกียรติพระบาทสมเด็จพระปรมินทรมหาภูมิพลอดุลยเดช เนื่องในโอกาสที่องค์การทรัพย์สินทางปัญญาโลก ( WIPO ) ทูลเกล้าทูลกระหม่อมถวายรางวัลผู้นำโลกด้านทรัพย์สินทางปัญญา เพื่อเฉลิมพระเกียรติและเชิดชูพระอัจฉริยภาพในการส่งเสริมเผยแพร่บทบาทด้านทรัพย์สินทางปัญญาและพัฒนานวัตกรรมสิ่งประดิษฐ์ต่าง ๆ โดยพัฒนาคุณภาพชีวิตของคนไทยและเป็นประโยชน์ต่อชาวโลก เช่น กังหันน้ำชัยพัฒนา และโครงการทำฝนหลวง ทรงเป็นนักสร้างสรรค์ นักประดิษฐ์ ผลงานของพระองค์ท่านทดลองแล้ว ได้ประโยชน์และมีผลในการปฏิบัติได้จริง มีคุณค่าในด้านทรัพย์สินทางปัญญาของโลก