PromptPay





สําหรับบทความนี้จะมีเนื้อหาเกี่ยวกับ Docker Container นะครับ เราจะมาดู และทําความเข้าใจกันว่า Docker Container มันคืออะไร และเกี่ยวข้องกับ Docker Image อย่างไร

หลังจากที่เราสร้าง Docker Image ขึ้นมา และเราก็นํา Docker Image นั้นมารัน Docker Engine ก็จะทําการสร้าง Docker Container ขึ้นมาอยู่ในเครื่องเราพร้อมทั้ง Start Container นั้นด้วย เราสามารถที่จะสั่ง Start, Stop Container ได้ การที่เราสั่ง Start หรือ Stop Container Docker Container ก็ยังคงอยู่ในเครื่องเรา Container จะหายไปก็ต่อเมื่อเราสั่งลบมัน
สําหรับ Docker Container ให้เราจินาการว่ามันเป็นเครื่อง Server 1 เครื่อง ที่ถูกจําลองสภาพแวดล้อมขึ้นมาซึ่งภายในก็จะมีไฟล์ต่างๆที่ OS นั้นๆควรจะมี ไฟล์ต่างๆเหล่านี้จะเป็นไฟล์ที่อยู่ใน Container เท่านั้น จะไม่เกี่ยวข้องกับ Container อื่น หรือ ไฟล์ใน OS หลัก (OS ของ Server จริงๆ) ดังนั้นเมื่อไฟล์ หรือข้อมูลใน Container ใดๆ เกิดการเปลี่ยนแปลง จะไม่มีผลกับ Container อื่นๆ และก็จะไม่มีผลอะไรกับ OS หลักด้วย จากที่ผมบอกไปตอนต้นว่าไฟล์หรือข้อมูลต่างๆใน 1 Container จะไม่เกี่ยวข้องกับ OS หลัก แต่เราสามารถที่จะ Map path จากภายใน Container ออกมายัง path ของ OS หลักได้ ด้วย Data volumes ผมจะอธิบายในหัวข้อถัดไปครับ

Data volumes จะถูกสร้างขึ้นมา เมื่อ Container ถูกสร้างขึ้น และเราสามารถที่จะ add หรือ map path ของ OS หลัก เข้ากับ path ของ Container ได้ อาจจะถามว่า แล้วเราจะ map เพื่ออะไร จากที่ผมบอกไปตอนต้นว่า Container จะถูกส้รางเมื่อ เรารัน Docker Image และข้อมูลภายใน Container จะไม่เกี่ยวข้องกับภายนอกเลย เมื่อใดที่ Container ถูกลบ ข้อมูลที่อยุ่ภายในก็จะหายด้วย ดังนั้นเราจึงต้อง map path ออกมาข้างนอกเพื่อเก็บข้อมูลที่สําคัญๆ เช่นข้อมูลของ database ฯลฯ ส่วนวิธีการ map path และการ run Container ผมจะบอกในหัวข้อถัดไป
Container จะถูกสร้างหรือ ลบเมื่อไรก็ได้ไม่สําคัญ สิ่งที่สัาคัญคือ Image และข้อมูลต่างๆ ดังนั้นเราไม่ควรเก็บข้อมูลต่างๆไว้ใน Container เพราะเมื่อ Container เราถูกลบ ข้อมูลของเราจะหายไปด้วย
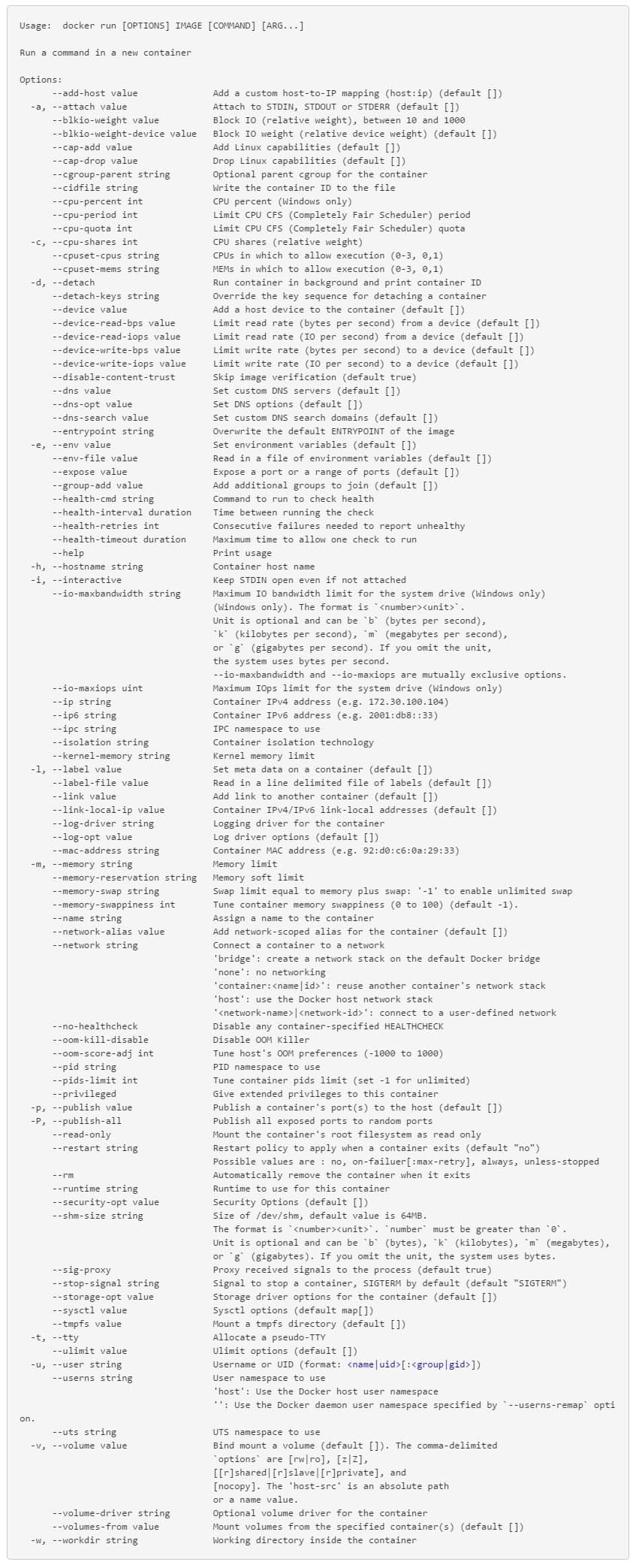
วิธีใช้คําสั่ง Run docker เพื่อสร้าง Container จาก Docker Image ใช้คําสั่งนี้
docker run <option> <image id/name> <command>อธิบายการใช้งานคําสั่ง
ตัวอย่าง ถ้าผมต้องการจะ Run node image ผมจะใช้คําสั่งนี้
docker run -t -d --name test_run_node -p 3000:8080 -v /home/pi:/usr/src/app nodeรายละเอียดของคําสั่ง
เมื่อใช้คําสั่งนี้ Docker จะหาว่าในเครื่องของเรามี Docker Image ที่เราระบุหรือป่าว ถ้าไม่มี Docker จะไปค้นหาและโหลด Docker Image จาก hub.docker.com แล้วเราก็จะได้ Container ที่ชื่อว่า test_run_node ขึ้นมา 1 อัน
วิธี config ip ใน linuxเริ่มต้นด้วยการเปิดไฟล์ config ด้วยคําสั่ง
VoWifi คือ การโทรศัพท์ผ่าน wifi โดยการทํางานจะเป็นแบบนี้ครับ พูดง่ายๆก็คือ แทนที่จะใช้สัญญานจากโทรศัพท์(สัญญานคลื่นความถี่ โทรศัพท์เคลื่อนที่ทั่วไป) เปลี่ยนไปใช้สัญญานจาก wifi(internet) แทน ข้อดีคือ เมื่อคุณไปต่างประเทศ คุณไม่จําเป็นต้องใช้เสาสัญญานของประเทศนั้นๆ เพียงแค่มีสัญญาน wifi คุณก็สามารถใช้งานโทรศัพท์ได้เหมือนอยู่ที่ประเทศไทย
สวัสดีครับ ในบทความนี้ก็เป็น EP.11 แล้วนะครับ โดยเนื้อหาจะเป็นเรื่องเกี่ยวกับ Panic คืออะไร ใช้ทําอะไร และมีวิธีการใช้อย่างไรสําหรับท่านใดที่ยังไม่ได้อ่าน EP.10 ท่านสามารถกลับไปอ่านก่อนได้นะครับที่นี่ Go EP.10 Defer ในภาษา Goมาเริ่มเรียนรู้ไปด้วยกันตามหัวข้อด้านล่างเลยครับ